



I-Three-Axis eHorizontal Turn Positioner / i-Welding Robot Positioner
IiParameters zobuGcisa
| Utshintsho oluthe nkqo lweTriaxial Servo Positioner | Indawo ethe tyaba yeRotary Triaxial Servo Positioner | ||||||
| Inombolo yesiriyeli | IIPROJEKTHI | Ipharamitha | Ipharamitha | INGXELO | Ipharamitha | Ipharamitha | INGXELO |
| 1 | Umthwalo olinganisiweyo | 500kg | 1000kg | Ngaphakathi kwe-R400mm iradiyasi ye-axis yesibini | 500kg | 1000kg | Ngaphakathi kwe-R400mm/R500mm iradiyasi ye-axis yesibini |
| 2 | Irediyasi esemgangathweni ye-gyration ye-spindle | R1200mm | R1500mm | R1200mm | R1800mm | ||
| 3 | Irediyasi ye-gyration eqhelekileyo ye-countershaft | R400mm | R500mm | R400mm | R500mm | ||
| 4 | I-engile yokuqala ye-axis flip | ±180° | ±180° | ±180° | ±180° | ||
| 5 | I-engile yokujikeleza kwe-axis yesibini | ±360° | ±360° | ±360° | ±360° | ||
| 6 | Ilinganiswe ngesantya sokunyuka se-axis yokuqala | 50°/S | 24°/S | 50°/S | 24°/S | ||
| 7 | Isantya esijikelezayo se-axis yesibini | 70°/S | 70°/S | 70°/S | 70°/S | ||
| 8 | Phinda ukuchaneka kwendawo | ±0.10mm | ±0.20mm | ±0.10mm | ±0.20mm | ||
| 9 | Umda wesakhelo sokufuduswa (ubude×ububanzi×ubude) | 2200mm×800mm ×90mm | 3200mm×1000mm ×110mm | 2200mm×800mm ×90mm | 3200mm×1000mm ×110mm | ||
| 10 | Idimensioni iyonke yokutshintsha indawo (ubude×ububanzi×ubude) | 4000mm×700mm ×1650mm | 5200mm×1000mm ×1850mm | 4000mm×700mm ×1650mm | 4500mm×3600mm ×1750mm | ||
| 11 | Ukuphakama kombindi wokujikeleza kwe-axis yokuqala | 1350mm | 1500mm | 800mm | 1000mm | ||
| 12 | Iimeko zokubonelela ngombane | Isigaba sesithathu 200V±10%50HZ | Isigaba sesithathu 200V±10%50HZ | Isigaba sesithathu 200V±10%50HZ | Isigaba sesithathu 200V±10%50HZ | Nge-transformer yodwa | |
| 13 | Iklasi ye-Insulation | H | H | H | H | ||
| 14 | Ubunzima obushiyekileyo bezixhobo | Malunga ne-1800kg | Malunga nama-3000kg | Malunga nama-2000kg | Malunga nama-2000kg | ||
Indawo ethe tyaba yeRotary Triaxial Servo Positioner

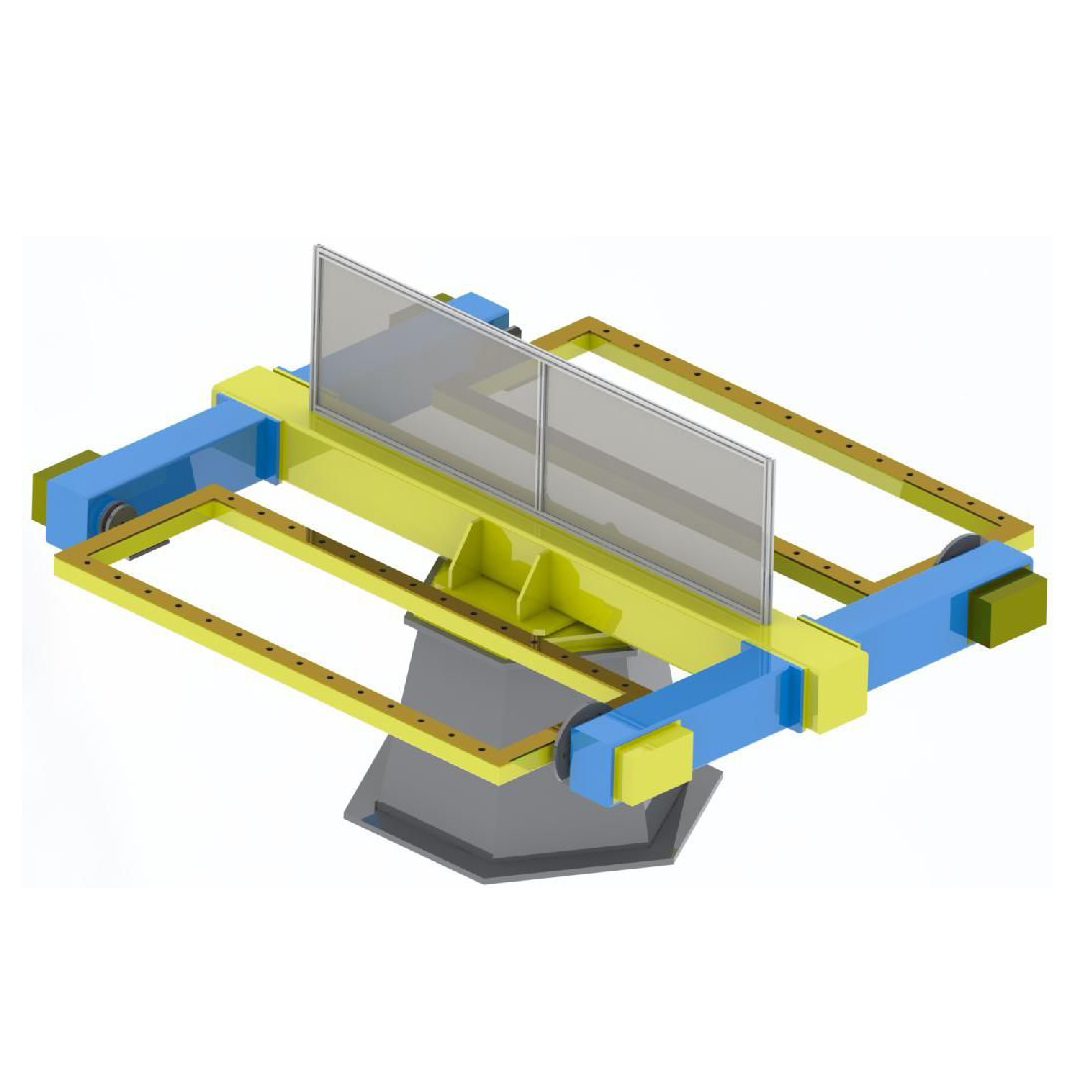
Utshintsho oluthe nkqo lweTriaxial Servo Positioner
Ulwakhiwo Intshayelelo
I-triaxial vertical turnover turnover positioner ye-servo ikakhulu yenziwe ngesakhelo esidityanisiweyo esidityanisiweyo, isakhelo sokufuduswa kwenguqu, i-AC servo motor kunye ne-RV echanekileyo yokunciphisa, inkxaso ejikelezayo, indlela yokuqhuba, ikhaka elikhuselayo kunye nenkqubo yokulawula umbane.
Isakhelo esidityanisiweyo esidityanisiweyo sidityaniswe neeprofayili ezikumgangatho ophezulu. Emva kwe-annealing kunye nokunciphisa uxinzelelo, kuya kucutshungulwa ngomatshini ochwephesha ukuqinisekisa ukuchaneka okuphezulu komatshini kunye nokuchaneka kwezikhundla eziphambili. Umphezulu utshizwe ngepeyinti yembonakalo echasene nomhlwa, entle kwaye enesisa, kwaye umbala unokulungiswa ngokweemfuno zabathengi.
Isakhelo sokufuduswa kwenguqu siya kudityaniswa ngentsimbi yeprofayili ekumgangatho ophezulu kwaye iqhutywe ngoomatshini bobuchwephesha. Umphezulu uya kwenziwa ngoomatshini abanemingxuma eqhelekileyo ephothiweyo yokuxhoma isixhobo sokuxhoma, kwaye ukupeyinta kunye nokwenza mnyama kunye nonyango lothintelo lomhlwa luya kwenziwa.
I-AC servo motor ene-RV reducer ikhethwa njengendlela yamandla, enokuqinisekisa ukuzinza kokujikeleza, ukuchaneka kokubeka kunye
Ukuqina okude kunye nezinga lokungaphumeleli eliphantsi. Indlela yokuqhuba yenziwe ngobhedu, enefuthe elihle lokuqhuba. Isiseko sokuqhuba samkela ukugquma okudibeneyo, okunokukhusela ngokufanelekileyo i-servo motor, irobhothi kunye nomthombo wamandla we-welding.
Inkqubo yokulawula yombane ithatha i-Japan Omron PLC ukulawula i-positioner, kunye nokusebenza okuzinzile kunye nezinga eliphantsi lokungaphumeleli. Amacandelo ombane akhethwe kwiimpawu ezidumileyo ekhaya nakwamanye amazwe ukuqinisekisa umgangatho kunye nokuzinza kokusetyenziswa.
Ikhaka lokuthintela ukukhanya lidityaniswe kunye neprofayili ye-aluminium kunye neplate yeplastiki ye-aluminium ukukhusela ekukhanyeni kwe-arc eyenziwe ngexesha le-welding kunye nokusika.








